Dr. Mooney is an independent engineering consultant specializing in wearable robotics. Typical applications require high power actuators that can comfortably apply loads to the human body in an efficient and biomimetic manner. Luke received his PhD and Masters of Science in mechanical engineering from the Biomechatronics Group at MIT's Media Lab. His doctoral research focused on the design, development and testing of leg exoskeletons for human augmentation. Other projects include:
Robotic leg prostheses
Muscle stiffness sensors
IMU control algorithms
Torsional spring design
Design for 3D printing
Massachusetts Institute of Technology:
Cambridge, MA
2014-2016: Ph.D in Mechanical Engineering
2012-2014: Master's of Science
2008-2012: Bachelor's of Science
Westford Academy:
Westford, MA
2004-2008: High School
Peer reviewed articles and refereed proceedings
Mooney LM, Herr HM, Biomechanical walking mechanisms underlying the metabolic reduction caused by an autonomous exoskeleton, Journal of NeuroEngineering and Rehabilitation, 2015.
Mooney LM, Ku SL, Abromowitz M, Mooney JA, Sun X, Bao Q, Measuring muscle stiffness by linear mechanical perturbation, Wearable and Implantable Body Sensor Networks (BSN), 2015.
Mooney LM, Rouse EJ, Herr HM, Autonomous exoskeleton reduces metabolic cost of human walking, Journal of NeuroEngineering and Rehabilitation, 2014.
Mooney LM, Rouse EJ, Herr HM, Autonomous exoskeleton reduces metabolic cost of walking, Conference Proceedings of IEEE EMBC, 2014.
Mooney LM, Lai C, Rouse EJ, Design and Characterization of a Biologically Inspired Quasi-Passive Prosthetic Ankle-Foot, Conference Proceedings of IEEE EMBC, 2014.
Mooney LM*, Rouse EJ*, Herr HM, Clutchable Series-Elastic Actuator: Implications for Prosthetic Knee Design, International Journal of Robotics Research, 2014.
Mooney LM, Rouse EJ, Herr HM, Autonomous exoskeleton reduces metabolic cost of human walking during load carriage, Journal of NeuroEngineering and Rehabilitation, 2014.
Mooney LM, Herr HM, Continuously-Variable Series-Elastic Actuator, International Conference on Rehabilitative Robotics, 2013.
Rouse EJ, Mooney LM,, Martinez-Villalpando EC, Herr HM, Clutchable series-elastic actuator: design of a robotic knee prosthesis for minimum energy consumption, International Conference on Rehabilitative Robotics, 2013.
Martinez-Villalpando EC, Mooney LM,, Elliott G, Herr HM, Antagonistic active knee prosthesis. A metabolic cost of walking comparison with a variable-damping prosthetic knee, Conference Proceedings of IEEE EMBC, 2011.
Theses
Mooney LM,Autonomous powered exoskeleton to improve the efficiency of human walking, PhD in mechanical engineering, MIT, 2016.
Mooney LM,The use of series compliance and variable transmission elements in the design of a powered knee prosthesis, Master's of Science, MIT, 2014.
Mooney LM,Variable damping controller for a prosthetic knee during swing extension, Bachelor's of Science, MIT, 2012.
*Authors contributed equally
Awards
2014: 1st place in Admiral Luis DeFlorez Award for Excellence in Mechanical Engineering Design at MIT
2014: MIT Graduate Student Mentor of the Year for Undergraduate Research
2012: NSF Graduate Research Fellowship
2012: Wunsch Foundation Silent Hoist and Crane Award for Academic Excellence
2011: MIT Park Award for Outstanding Performance in Manufacturing
2010: MIT Iron Man Competition
Undergraduate Researchers
2015-present:Mina Fahmi
2015-present:Rebecca Steinmeyer
2015-present:Deron Browne
2014-2015:Thuan Doan
2014-Present:Jake Mooney
2014-2015:Rhys Bendell
2013-2015:Cara Lai
2013-2014:Flora Liu
2014-Present:Dalia Leibowitz
2014:Jonathan Casey
2013-2014:Otto Briner
2011-2013:Luis Carbajal
Autonomous Powered Exoskeleton
I am working on the design, development and testing of a powered lower limb exoskeleton for my doctoral work. The aim of the autonomous powered leg exoskeleton is to reduce the energetic cost of walking. The autonomous battery powered exoskeleton is capable of providing substantial levels of positive mechanical power to the ankle during the push-off region of stance phase.
The metabolic energy consumption of seven study participants (85 ± 12 kg body mass) was measured while walking on a level treadmill at 1.4 m/s. Testing conditions included not wearing the exoskeleton and wearing the exoskeleton, in both powered and unpowered modes. When averaged across the gait cycle, the autonomous exoskeleton applied a mean positive mechanical power of 26 ± 1 W (13 W per ankle) with 2.12 kg of added exoskeletal foot-shank mass (1.06 kg per leg). Use of the leg exoskeleton significantly reduced the metabolic cost of walking by 35 ± 13 W, which was an improvement of 10 ± 3% (p = 0.023) relative to the control condition of not wearing the exoskeleton.
We also measured the metabolic energy consumption of seven subjects walking on a level treadmill at 1.5 m/s, while wearing a 23 kg vest. During the push-off portion of the stance phase, the exoskeleton applied positive mechanical power with an average across the gait cycle equal to 23 ± 2 W (11.5 W per ankle). Use of the autonomous leg exoskeleton significantly reduced the metabolic cost of walking by 36 ± 12 W, which was an improvement of 8 ± 3% (p = 0.025) relative to the control condition of not wearing the exoskeleton. In the design of leg exoskeletons, the results of this study highlight the importance of minimizing exoskeletal power dissipation and added limb mass, while providing substantial positive power during the walking gait cycle.
Continuously-Variable Series-Elastic Actuator
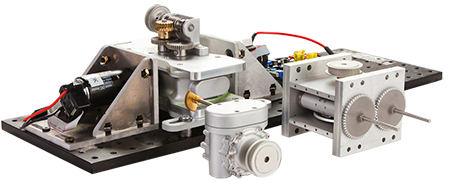
Actuator efficiency is an important factor in design of powered legged robots. My Master's thesis focused on the development and control of robotic actuators that utilize variable transmissions. I developed the continuously variable series-elastic actuator (CV-SEA) as an efficient actuator for legged locomotion. The CV-SEA implements a continuously variable transmission (CVT) between a motor and series elastic element. The CVT reduces the torque seen at the motor, allowing the motor to operate in speed regimes of higher efficiency, while the series-elastic element efficiently stores and releases mechanical energy, reducing motor work requirements for actuator applications where an elastic response is sought. Placing the CVT between the motor and transmission allows the device to be considerably lighter. I also looked at the optimization of energy-efficient control strategies for general actuators. A genetic algorithm was used to simultaneously optimize actuator parameters and control strategy, such as variable transmission profiles.
The cyclic and often linear torque-angle relationship of locomotion presents the opportunity to innovate on the design of traditional series-elastic actuators (SEAs). I worked with Dr. Elliott Rouse on the development of a novel modification to the SEA architecture that incldes a clutch in parallel with the motor within the SEA—denoted as a CSEA. This addition permits bimodal dynamics where the system is characterized by an SEA when the clutch is disengaged and a passive spring when the clutch is engaged. The purpose of the parallel clutch was to provide the ability to store energy in a tuned series spring, while requiring only reactionary torque from the clutch. Thus, when the clutch is engaged, a tuned elastic relationship can be achieved with minimal electrical energy consumption. The series elasticity was optimized to fit the spring-like torque-angle relationship of early stance phase knee flexion and extension during level ground walking. In simulation, the CSEA knee required 70% less electrical energy than a traditional SEA. We implemented the CSEA into a powered knee prosthesis, pictured to the right. The electrically powered knee is an order of magnitude more efficient than previous powered knees.
Quasi-Passive Ankle Stiffness Device
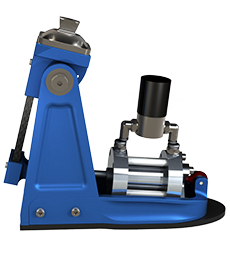
By design, commonly worn energy storage and release (ESR) prosthetic feet cannot provide biologically realistic ankle joint torque and angle profiles during walking. Additionally, their anthropomorphic, cantilever architecture causes their mechanical stiffness to decrease throughout the stance phase of walking, opposing the known trend of the biological ankle. I worked with Dr. Elliott Rouse and Cara Lai on the design of a quasi-passive pneumatic ankle-foot prosthesis that is able to replicate the
biological ankle’s torque and angle profiles during walking. The prosthetic ankle is comprised of a pneumatic piston, bending spring and solenoid valve. The pneumatic ankle prosthesis has been shown to provide biologically appropriate trends and magnitudes of torque, angle and stiffness behavior, when compared to the passive ESR prosthetic foot. Future work will focus on the development of a control system for the quasi-passive device and clinical testing of the pneumatic ankle to demonstrate efficacy.
Agonist Antagonist Active Knee Prosthesis
Transfemoral amputees exhibit both increased metabolic consumption and gait asymmetry during level ground walking. As an undergraduate, I developed a variable damping control strategy for swing in order to improve gait symmetry and reduce energy expenditure during level ground walking. The control strategy was implemented on the AAAKP devleoped by Dr. Ernesto Martinez-Villalpando. The variable damping coefficients followed a piecewise function of angle and state, and allowed for natural swing dynamics while walking.
Furniture Design
Catapults
In highschool, I designed various catapults and ballistae for my Latin Club. My freshman, sophomore, and junior years I built ballistae. A ballista is essentially a giant crossbow that launches large bolts, or arrows. The arrows each weighed 1lb and were about 3ft long. The arms of the ballistae were powered by vertical torsion engines, which use a bundle of twisted rope to store and release energy. The ballistae were able to launch the arrows over 500 ft. My senior year I built an onager, which is a more traditional catapult design used to launch spherical objects. The used a single horizontal torsion engine to power the arm and sling. The onager could launch a shot put about 400ft, and a pumpkin over 600ft.
Brewing... Beer
Sports
Movember
Since November 2010, I have grown out a mustache for the entire month of November. On team MassaSTACHEachusetss, I raise money with my fellow mustachianados for the Movember Foundation. The Movember Foundation's mission is to raise awareness and funds for men's health issues.


 Actuator efficiency is an important factor in design of powered legged robots. My Master's thesis focused on the development and control of robotic actuators that utilize variable transmissions. I developed the continuously variable series-elastic actuator (CV-SEA) as an efficient actuator for legged locomotion. The CV-SEA implements a continuously variable transmission (CVT) between a motor and series elastic element. The CVT reduces the torque seen at the motor, allowing the motor to operate in speed regimes of higher efficiency, while the series-elastic element efficiently stores and releases mechanical energy, reducing motor work requirements for actuator applications where an elastic response is sought. Placing the CVT between the motor and transmission allows the device to be considerably lighter. I also looked at the optimization of energy-efficient control strategies for general actuators. A genetic algorithm was used to simultaneously optimize actuator parameters and control strategy, such as variable transmission profiles.
Actuator efficiency is an important factor in design of powered legged robots. My Master's thesis focused on the development and control of robotic actuators that utilize variable transmissions. I developed the continuously variable series-elastic actuator (CV-SEA) as an efficient actuator for legged locomotion. The CV-SEA implements a continuously variable transmission (CVT) between a motor and series elastic element. The CVT reduces the torque seen at the motor, allowing the motor to operate in speed regimes of higher efficiency, while the series-elastic element efficiently stores and releases mechanical energy, reducing motor work requirements for actuator applications where an elastic response is sought. Placing the CVT between the motor and transmission allows the device to be considerably lighter. I also looked at the optimization of energy-efficient control strategies for general actuators. A genetic algorithm was used to simultaneously optimize actuator parameters and control strategy, such as variable transmission profiles.
 in a tuned series spring, while requiring only reactionary torque from the clutch. Thus, when the clutch is engaged, a tuned elastic relationship can be achieved with minimal electrical energy consumption. The series elasticity was optimized to fit the spring-like torque-angle relationship of early stance phase knee flexion and extension during level ground walking. In simulation, the CSEA knee required 70% less electrical energy than a traditional SEA. We implemented the CSEA into a powered knee prosthesis, pictured to the right. The electrically powered knee is an order of magnitude more efficient than previous powered knees.
in a tuned series spring, while requiring only reactionary torque from the clutch. Thus, when the clutch is engaged, a tuned elastic relationship can be achieved with minimal electrical energy consumption. The series elasticity was optimized to fit the spring-like torque-angle relationship of early stance phase knee flexion and extension during level ground walking. In simulation, the CSEA knee required 70% less electrical energy than a traditional SEA. We implemented the CSEA into a powered knee prosthesis, pictured to the right. The electrically powered knee is an order of magnitude more efficient than previous powered knees.
 The prosthetic ankle is comprised of a pneumatic piston, bending spring and solenoid valve. The pneumatic ankle prosthesis has been shown to provide biologically appropriate trends and magnitudes of torque, angle and stiffness behavior, when compared to the passive ESR prosthetic foot. Future work will focus on the development of a control system for the quasi-passive device and clinical testing of the pneumatic ankle to demonstrate efficacy.
The prosthetic ankle is comprised of a pneumatic piston, bending spring and solenoid valve. The pneumatic ankle prosthesis has been shown to provide biologically appropriate trends and magnitudes of torque, angle and stiffness behavior, when compared to the passive ESR prosthetic foot. Future work will focus on the development of a control system for the quasi-passive device and clinical testing of the pneumatic ankle to demonstrate efficacy.
 Transfemoral amputees exhibit both increased metabolic consumption and gait asymmetry during level ground walking. As an undergraduate, I developed a variable damping control strategy for swing in order to improve gait symmetry and reduce energy expenditure during level ground walking. The control strategy was implemented on the AAAKP devleoped by Dr. Ernesto Martinez-Villalpando. The variable damping coefficients followed a piecewise function of angle and state, and allowed for natural swing dynamics while walking.
Transfemoral amputees exhibit both increased metabolic consumption and gait asymmetry during level ground walking. As an undergraduate, I developed a variable damping control strategy for swing in order to improve gait symmetry and reduce energy expenditure during level ground walking. The control strategy was implemented on the AAAKP devleoped by Dr. Ernesto Martinez-Villalpando. The variable damping coefficients followed a piecewise function of angle and state, and allowed for natural swing dynamics while walking.







 Since November 2010, I have grown out a mustache for the entire month of November. On team MassaSTACHEachusetss, I raise money with my fellow mustachianados for the Movember Foundation. The Movember Foundation's mission is to raise awareness and funds for men's health issues.
Since November 2010, I have grown out a mustache for the entire month of November. On team MassaSTACHEachusetss, I raise money with my fellow mustachianados for the Movember Foundation. The Movember Foundation's mission is to raise awareness and funds for men's health issues.